S2 Controller Board - Day 1
May. 20, 2024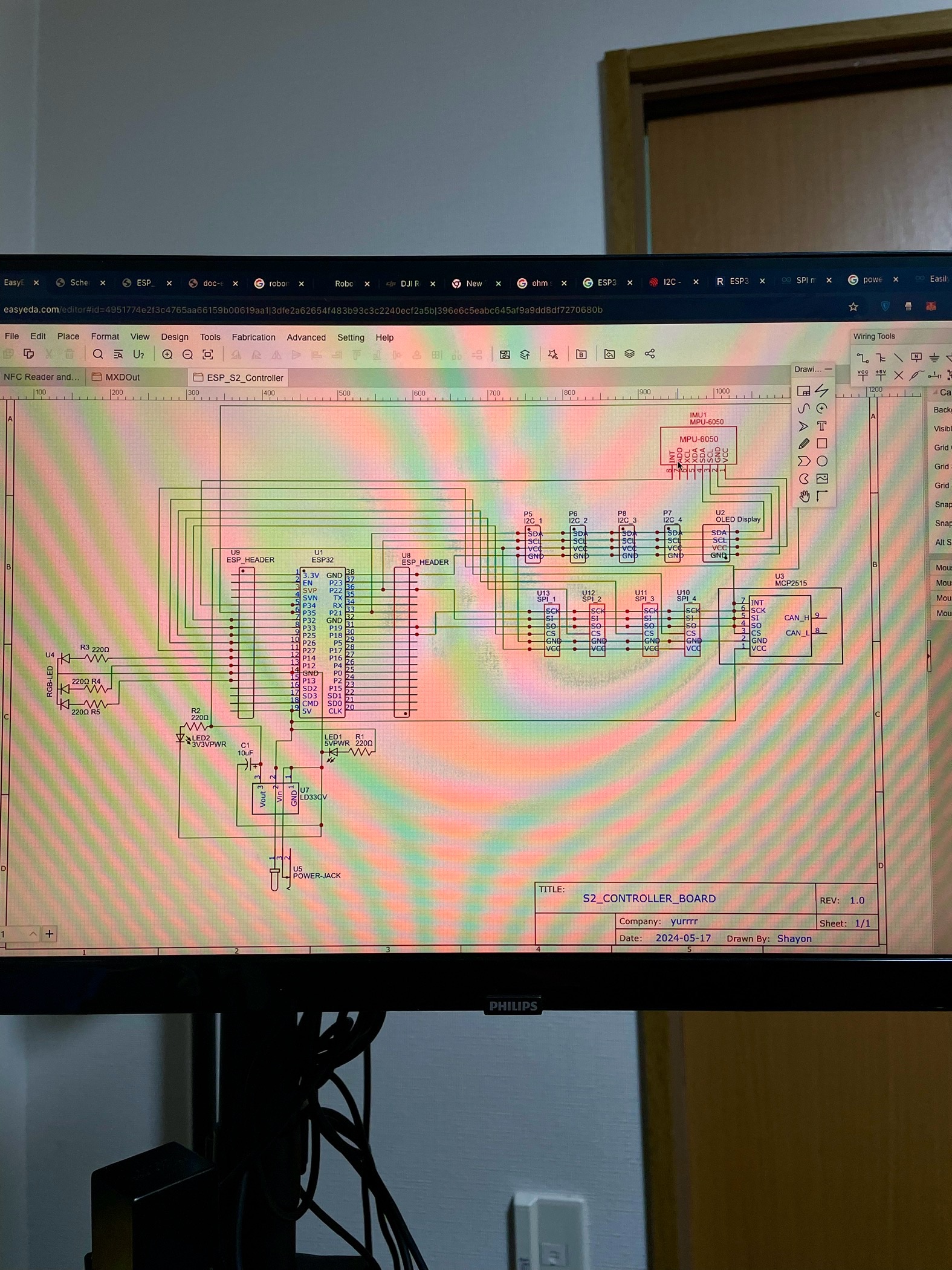
So, the new robot we’re building out of the parts salvaged from R1 and R2, I want to make a central controller board for it. Basically a PCB that would house the ESP32 dev board, the MCP2515 CAN transceiver module, the AdXL345 accelerometer and a bunch of JST connectors for SPI and IIC connections. I don’t want the wiring to get messy like last time.
I’m designing the schematic for it right now. Will move onto designing the PCB after that.
Ideally, I would use the bare module form of ESP32 and make the controller board from scratch, but don’t have enough time for that right now. We have an event at the university coming up in two weeks, so gotta have something to demonstrate there. After that one, hopefully I’ll make my first circuit with SMD components.
Can’t wait to get to that.